


沈阳自动化所在类脑导航研究方面取得进展
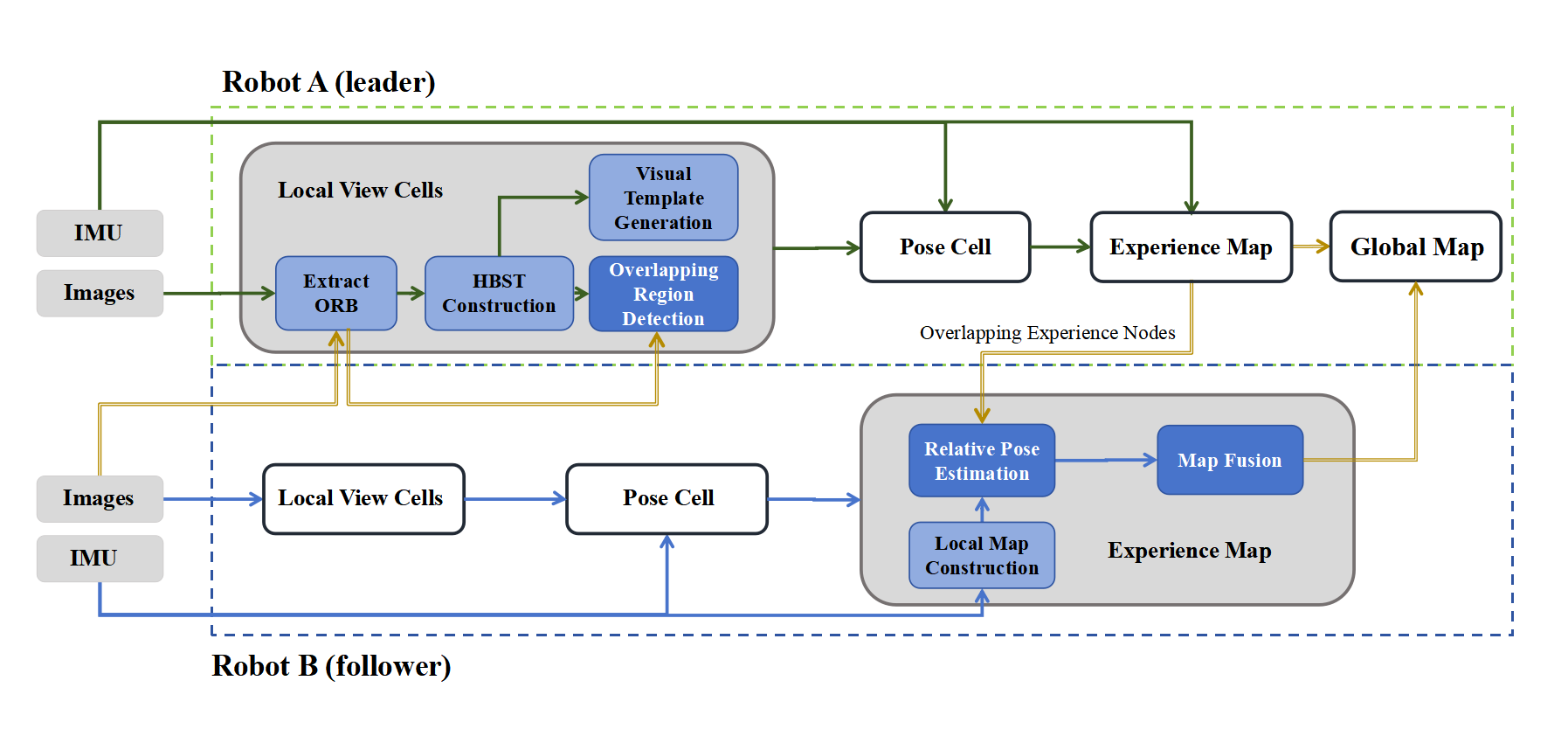
系统整体架构示意图
类脑导航是一种模仿生物大脑神经系统处理空间信息方式的智能导航技术,通过借鉴哺乳动物大脑位置细胞、网格细胞等导航机制,构建新型的自主导航系统。这类系统通常具有低功耗、高鲁棒性、强自主学习与适应能力等特点,尤其在复杂、动态或未知环境中表现潜力突出。然而,当前的类脑导航系统局限于单机器人建图,存在容错率与效率低等问题,制约了优势的发挥。
为此,中国科学院沈阳自动化研究所机器人学研究室科研团队提出了一种协同类脑建图方法,可有效提升多机联动条件下的建图效率。科研团队提出了一种基于序列匹配的重叠区域检测方法,实现了不同经验地图之间的数据关联。为完成局部经验地图的融合,科研团队提出了一种连续地图融合图松弛算法,利用得到的相互位姿关系完成全局经验地图的构建。科研团队还设计了一种主从式的多机器人结构,对提出的方法进行了验证。
科研团队对成果在多个公开数据集和真实环境进行了测试,所提方法的有效性均得到了验证,所建立的多机类脑导航定位系统取得了与单机相近的建图效果。
相关研究以A Collaborative Mapping System for a Brain-Inspired SLAM为题发表于IEEE Internet of Things Journal。沈阳自动化所硕士研究生赵杭飘为第一作者,唐凤珍研究员为通讯作者。
研究工作得到国家自然科学基金面上项目、中国科学院稳定支持基础研究领域青年团队计划和沈阳市中青年科技创新人才培育专项U40杰出青年计划项目的支持。(机器人学研究室)
附件下载:




